18. Utilizando un modelo pre-entrenado#
torchvision.models ofrece una gran cantidad de modelos de la literatura de deep learning que pueden utilizarse de forma directa.
Por defecto, cuando se carga un modelo de models, los pesos son aleatorios. Es decir que cargamos una arquitectura que no está entrenada. En cambio si indicamos una de las opciones posibles para el argumento weights en el constructor del modelo, se descargará un modelo entrenado.
A continuación veremos algunos ejemplos de modelos para clasificar, localizar y segmentar.
18.1. Modelo para clasificar imágenes#
torchvision tiene una basta cantidad de modelos para clasificar incluyendo distintas versiones de VGG, ResNet, AlexNet, GoogLeNet, DenseNet, entre otros.
A continuación se carga un modelo resnet18 pre-entrenado con el famoso dataset ImageNet.
%matplotlib inline
import numpy as np
from matplotlib import pyplot as plt
from torchvision import models
model = models.resnet18(weights=models.resnet.ResNet18_Weights.IMAGENET1K_V1)
model.eval();
Los modelos pre-entrenados esperan imágenes con
tres canales (RGB)
al menos 224x224 píxeles
píxeles entre 0 y 1 (float)
Además los canales deben estar normalizados según:
normalize = torchvision.transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
Preparamos una imagen para inferir su clase con Resnet18.
from PIL import Image
img = Image.open("img/dog.jpg")
fig, ax = plt.subplots(figsize=(6, 4))
ax.imshow(img);

Si la normalizamos según la transformación anterior se obtiene:
import torch
from torchvision import transforms
TL_transform = transforms.Compose([transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize(mean=(0.485, 0.456, 0.406),
std=(0.229, 0.224, 0.225))])
normalized_img = TL_transform(img)
fig, ax = plt.subplots(figsize=(6, 4))
ax.imshow(normalized_img.permute(dims=[1, 2, 0]).detach().numpy());
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Luego podemos evaluar el modelo con la nueva imagen:
import torch.nn as nn
probs = nn.Softmax(dim=1)(model.forward(normalized_img.unsqueeze(0)))
Este modelo tiene
len(probs[0, :])
1000
neuronas de salida (clases). Estudiemos las cinco clases más probables según el modelo:
import urllib.request, json
with urllib.request.urlopen("https://s3.amazonaws.com/deep-learning-models/image-models/imagenet_class_index.json") as url:
labels = json.load(url)
best = probs.argsort(descending=True)
print("idx prob name")
for entity in best[0, :5].numpy():
print(entity, probs[0, entity].detach(), labels[str(entity)][1])
idx prob name
263 tensor(0.2759) Pembroke
151 tensor(0.1574) Chihuahua
259 tensor(0.1539) Pomeranian
273 tensor(0.1503) dingo
260 tensor(0.1461) chow
18.2. Modelo para detectar entidades en imágenes#
Adicional a los modelos de clasificación torchvision también tiene modelos de:
Detección de objetos/entidades: Faster RCNN, SSD, RetinaNet
Segmentación por instancia: Mask RCNN
Segmentación semántica: FCC, DeepLab
Clasificación de video
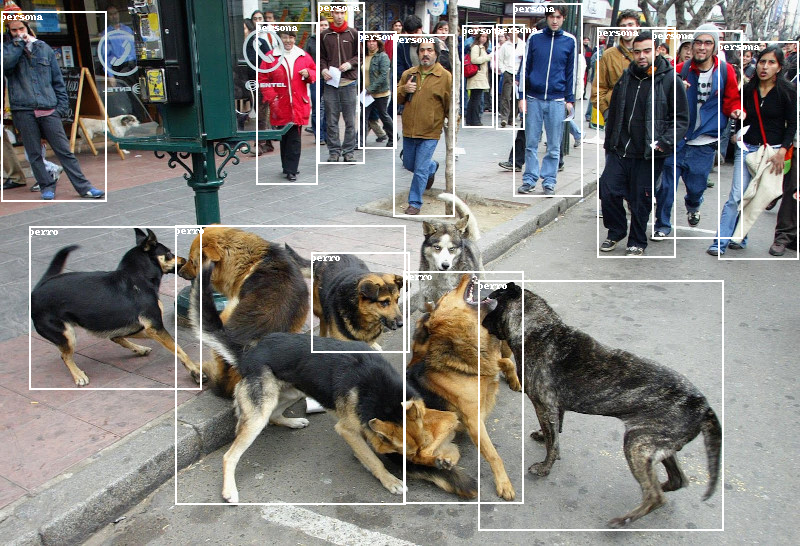
A continuación probaremos la Faster RCNN para hace detección. Este modelo fue pre-entrenado en la base de datos COCO.
El modelo retorna un diccionario con:
‘boxes’: Los bounding box de las entidades
‘labels’: La etiqueta de la clase más probable de la entidad
‘score’: La probabilidad de la etiqueta
model = models.detection.fasterrcnn_resnet50_fpn(weights=models.detection.FasterRCNN_ResNet50_FPN_Weights.COCO_V1)
model.eval()
transform = transforms.ToTensor()
img = Image.open("img/pelea.jpg") # No require normalización de color
img_tensor = transform(img)
result = model(img_tensor.unsqueeze(0))[0]
def filter_results(result, threshold=0.9):
mask = result['scores'] > threshold
bbox = result['boxes'][mask].detach().cpu().numpy()
lbls = result['labels'][mask].detach().cpu().numpy()
return bbox, lbls
A continuación se muestran algunas de las clases con sus bounding boxes dibujados sobre la imagen original:
from PIL import ImageFont, ImageDraw
#fnt = ImageFont.truetype("arial.ttf", 20)
label2name = {1: 'persona', 2: 'bicicleta', 3: 'auto', 4: 'moto',
8: 'camioneta', 18: 'perro'}
def draw_rectangles(img, bbox, lbls):
draw = ImageDraw.Draw(img)
for k in range(len(bbox)):
if lbls[k] in label2name.keys():
draw.rectangle(bbox[k], fill=None, outline='white', width=2)
draw.text([int(d) for d in bbox[k][:2]], label2name[lbls[k]], fill='white')
bbox, lbls = filter_results(result)
img = Image.open("img/pelea.jpg")
draw_rectangles(img, bbox, lbls)
display(img)
18.3. Transferencia de Aprendizaje#
A continuación usaremos la técnica de transferencia de aprendizaje para entrenar un clasificador de imágenes utilizando un fragmento de la base de datos Food-5K. El objetivo es clasificar si la imagen corresponde a comida o no.
Guardamos las imagenes con la siguiente estructura de carpetas:
!ls data/food5k/
!ls data/food5k/train
!ls data/food5k/valid
train valid
food non_food
food non_food
Dada esta estructura podemos utilizar torchvision.datasets.ImageFolder para crear los dataset de forma directa.
Como utilizaremos un modelo de clasificación preentrenado debemos transformar las imágenes según lo explicado anteriormente.
Adicionalmente se hará aumentación de datos en el conjunto de entrenamiento.
from torchvision import datasets
train_transforms = transforms.Compose([transforms.RandomRotation(30),
transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406],
[0.229, 0.224, 0.225])])
valid_transforms = transforms.Compose([transforms.Resize(255),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406],
[0.229, 0.224, 0.225])])
train_dataset = datasets.ImageFolder('data/food5k/train', transform=train_transforms)
valid_dataset = datasets.ImageFolder('data/food5k/valid', transform=valid_transforms)
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=32, shuffle=True)
valid_loader = torch.utils.data.DataLoader(valid_dataset, batch_size=256, shuffle=False)
# 6 imágenes de ejemplo:
fig, ax = plt.subplots(1, 6, figsize=(9, 2), tight_layout=True)
for i in range(6):
image, label = train_dataset[i]
ax[i].imshow(image.permute(1,2,0).numpy())
ax[i].axis('off')
ax[i].set_title(label)
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).
Clipping input data to the valid range for imshow with RGB data ([0..1] for floats or [0..255] for integers).

Usaremos el modelo ResNet18:
model = models.resnet18(weights=models.resnet.ResNet18_Weights.IMAGENET1K_V1)
Estudiemos la estructura de este modelo:
model
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer2): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer3): Sequential(
(0): BasicBlock(
(conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer4): Sequential(
(0): BasicBlock(
(conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=512, out_features=1000, bias=True)
)
En este caso re-entrenaremos sólo la última capa, llamada fc. Esta es la capa que se encarga de clasificar.
Las demás capas serán congeladas, es decir, no propagaremos gradiente. De esta forma evitamos sobreajustar el modelo con este conjunto de datos pequeño.
Para congelar una capa simplemente usamos requires_grad=False en sus parámetros. Cuando llamemos backward no se calculará gradiente para estas capas.
for param in model.parameters():
param.requires_grad = False
Ahora podemos crear una nueva capa de salida que reemplaza a fc.
Nota
El problema tiene dos clases, por lo tanto configuramos la capa fc con dos neuronas de salida.
model.fc = torch.nn.Linear(model.fc.in_features , 2) # Para resnet
Luego entrenamos de forma usual:
criterion = torch.nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=1e-3)
for epoch in range(10):
epoch_loss, acc = 0.0, 0.0
for x, y in train_loader:
optimizer.zero_grad()
yhat = model(x)
loss = criterion(yhat, y)
loss.backward()
optimizer.step()
epoch_loss += loss.item()
acc += torch.sum(yhat.argmax(dim=1) == y).item()
epoch_loss /= len(train_loader.dataset)
acc /= len(train_loader.dataset)
print(f"Train {epoch}, Loss: {epoch_loss:0.4f}, Acc: {acc:0.3f}")
epoch_loss, acc = 0.0, 0.0
for x, y in valid_loader:
yhat = model(x)
loss = criterion(yhat, y)
epoch_loss += loss.item()
acc += torch.sum(yhat.argmax(dim=1) == y).item()
epoch_loss /= len(valid_loader.dataset)
acc /= len(valid_loader.dataset)
print(f"Valid {epoch}, Loss: {epoch_loss:0.4f}, Acc: {acc:0.3f}")
Train 0, Loss: 0.0349, Acc: 0.404
Valid 0, Loss: 0.0079, Acc: 0.530
Train 1, Loss: 0.0221, Acc: 0.577
Valid 1, Loss: 0.0059, Acc: 0.670
Train 2, Loss: 0.0161, Acc: 0.788
Valid 2, Loss: 0.0040, Acc: 0.860
Train 3, Loss: 0.0121, Acc: 0.909
Valid 3, Loss: 0.0032, Acc: 0.910
Train 4, Loss: 0.0103, Acc: 0.933
Valid 4, Loss: 0.0026, Acc: 0.930
Train 5, Loss: 0.0084, Acc: 0.909
Valid 5, Loss: 0.0023, Acc: 0.950
Train 6, Loss: 0.0084, Acc: 0.933
Valid 6, Loss: 0.0021, Acc: 0.940
Train 7, Loss: 0.0079, Acc: 0.938
Valid 7, Loss: 0.0019, Acc: 0.950
Train 8, Loss: 0.0071, Acc: 0.942
Valid 8, Loss: 0.0018, Acc: 0.970
Train 9, Loss: 0.0071, Acc: 0.938
Valid 9, Loss: 0.0017, Acc: 0.940
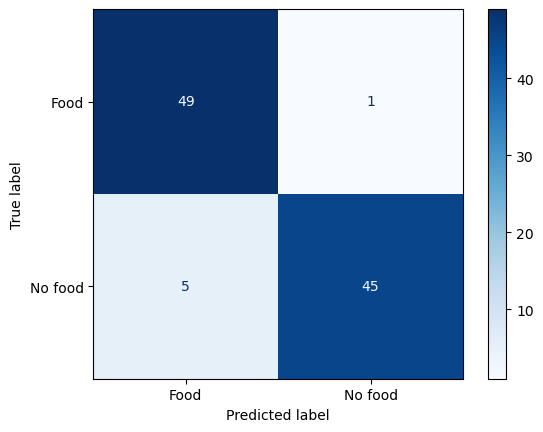
Evaluamos el modelo con:
targets, predictions = [], []
for x, y in valid_loader:
logits = model(x)
predictions.append(logits.argmax(dim=1).detach().numpy())
targets.append(y.numpy())
predictions = np.concatenate(predictions)
targets = np.concatenate(targets)
from sklearn.metrics import ConfusionMatrixDisplay
ConfusionMatrixDisplay.from_predictions(y_true=targets, y_pred=predictions,
display_labels=['Food', 'No food'], cmap=plt.cm.Blues)
<sklearn.metrics._plot.confusion_matrix.ConfusionMatrixDisplay at 0x7f6c3ee4fbb0>
Actividades propuestas
Entrenar el modelo anterior con más épocas
Entrenar el modelo anterior sin pre-entrenamiento
Entrenar un modelo tipo Lenet5 sobre el dataset anterior
Comparar los resultados obtenidos entre los distintos modelos.