12. Breve tutorial de PyTorch#
PyTorch es una librería de alto nivel para Python que provee
Una clase tensor para hacer cómputo de alto rendimiento con capacidad de auto-diferenciación
Un plataforma para crear y entrenar redes neuronales
En tutorial revisaremos en detalle como se crean y manipulan tensores. Luego veremos como el submódulo torch.nn para crear redes neuronales artificiales
Instalación
Lo más recomendable para instalar esta librería es crear un ambiente de desarrollo con conda y ejecutar
conda install pytorch torchvision cudatoolkit=11.3 ignite -c pytorch
en caso de tener GPU o con
conda install pytorch torchvision cpuonly ignite -c pytorch
sino se cuenta con GPU
Ver también
Si no haz utilizado conda recomiendo revisar aquí
import torch
torch.__version__
'1.11.0'
12.1. Objeto Tensor#
La clase torch.Tensor es muy similar en uso al ndarray de NumPy. Un tensor corresponde a una matriz o arreglo n-dimensional con tipo definido que soporta operaciónes vectoriales de tipo SIMD y broadcasting
A continuación revisaremos las operaciones más fundamentales relacionadas a tensores
Creación de tensores
Un tensor puede crearse usando
constructores de torch
a partir de listas de Python o ndarray de NumPy
Por ejemplo para crear un vector de largo 10 relleno de ceros:
torch.zeros(10)
tensor([0., 0., 0., 0., 0., 0., 0., 0., 0., 0.])
Un vector de largo 10 relleno de unos:
torch.ones(10)
tensor([1., 1., 1., 1., 1., 1., 1., 1., 1., 1.])
Un vector con 10 números partiendo en cero y terminando en nueve
torch.linspace(0, 9, steps=10)
tensor([0., 1., 2., 3., 4., 5., 6., 7., 8., 9.])
Un tensor construido a partir de una lista:
una_lista = [0, 1, 2, 3, 4, 5, 6]
torch.Tensor(una_lista)
tensor([0., 1., 2., 3., 4., 5., 6.])
Un tensor construido a partir de un ndarray
import numpy as np
numpy_array = np.random.randn(10)
torch.from_numpy(numpy_array)
tensor([ 2.3634, 0.7277, 1.7162, -0.4610, 0.7706, -0.7328, 0.5429, -0.3567,
0.4777, -1.4907], dtype=torch.float64)
De PyTorch a NumPy
Para convertir un tensor de pytorch a un ndarray de numpy se utiliza el método numpy():
data = torch.randn(5)
data
tensor([ 0.9727, -0.7704, -0.9177, 2.9054, -0.0273])
data.numpy()
array([ 0.97273713, -0.770423 , -0.9177197 , 2.905431 , -0.02733249],
dtype=float32)
Atributos importantes de los tensores
Un tensor tiene un tamaño (dimesiones) y tipo específico. Esto se consulta con los atributos ndim/shape y dtype
a = torch.randn(10, 20, 30)
a.ndim, a.shape, a.dtype
(3, torch.Size([10, 20, 30]), torch.float32)
Un tensor puede estar alojado en la memoria del sistema (‘cpu’) o en la memoria de dispositivo (‘gpu’), esto se consulta con el atributo device:
a.device
device(type='cpu')
Cuando se crea un tensor se puede especificar el tipo y el dispositivo
a = torch.zeros(10, dtype=torch.int32, device='cpu')
display(a)
tensor([0, 0, 0, 0, 0, 0, 0, 0, 0, 0], dtype=torch.int32)
Manipulación de tensores
Sea el siguiente tensor de una dimensión:
a = torch.linspace(0, 9, 10)
a
tensor([0., 1., 2., 3., 4., 5., 6., 7., 8., 9.])
Podemos reorganizar las dimensiones del tensor con el método reshape:
b = a.reshape(2, 5)
b
tensor([[0., 1., 2., 3., 4.],
[5., 6., 7., 8., 9.]])
Podemos transponer el método transpose() o su alias T
b.T
tensor([[0., 5.],
[1., 6.],
[2., 7.],
[3., 8.],
[4., 9.]])
Podemos convertir un tensor de dimensión arbitraria a uno de una dimensión con flatten()
b.flatten()
tensor([0., 1., 2., 3., 4., 5., 6., 7., 8., 9.])
Podemos agregar una dimensión en una posición arbitraria con unsqueeze(d)
c = b.unsqueeze(1)
c, c.shape
(tensor([[[0., 1., 2., 3., 4.]],
[[5., 6., 7., 8., 9.]]]),
torch.Size([2, 1, 5]))
Cálculos con tensores
Un tensor soporta operaciones aritméticas y lógicas
Nota
Si el tensor está en memoria de sistema entonces las operaciones son realizadas por la CPU
data = torch.linspace(0, 5, steps=6)
data
tensor([0., 1., 2., 3., 4., 5.])
Algunos ejemplos de operaciones aritméticas
data + 5
tensor([ 5., 6., 7., 8., 9., 10.])
2*data
tensor([ 0., 2., 4., 6., 8., 10.])
data.pow(2)
tensor([ 0., 1., 4., 9., 16., 25.])
data.log()
tensor([ -inf, 0.0000, 0.6931, 1.0986, 1.3863, 1.6094])
Una operación lógica puede utilizarse para filtrar un tensor:
mask = data > 3
mask
tensor([False, False, False, False, True, True])
data[mask]
tensor([4., 5.])
Un ejemplo de broadcasting:
data2 = torch.ones(6)
data.unsqueeze(1), data2.unsqueeze(0), data.unsqueeze(1)*data2.unsqueeze(0)
(tensor([[0.],
[1.],
[2.],
[3.],
[4.],
[5.]]),
tensor([[1., 1., 1., 1., 1., 1.]]),
tensor([[0., 0., 0., 0., 0., 0.],
[1., 1., 1., 1., 1., 1.],
[2., 2., 2., 2., 2., 2.],
[3., 3., 3., 3., 3., 3.],
[4., 4., 4., 4., 4., 4.],
[5., 5., 5., 5., 5., 5.]]))
Cálculos en GPU
Usando el atributo to podemos intercambiar un tensor entre memoría de GPU (‘device’) y CPU (‘host’)
data = torch.zeros(10)
data = data.to('cuda')
Importante
Cuando todos los tensores involucrados en una operaciones están en memoria de dispositivo entonces el cálculo lo hace la GPU
La siguiente nota indica las opciones para intercambiar datos entre GPU y CPU que ofrece PyTorch: https://pytorch.org/docs/stable/notes/cuda.html
Nota
Una Graphical Processing Unit (GPU) o tarjeta de video es un hardware para hacer cálculos sobre mallas tridimensionales, generación de imágenes (rendering) y otras tareas gráficas. A diferencia de la CPU, la GPU es especialista en cálculo paralelo y tiene miles de nucleos (NVIDIA RTX 2080: 2944 nucleos)
12.2. Auto-diferenciación con Tensores#
En general, las redes neuronales se entrenan usando Gradiente descedente. Por lo tanto necesitamos calcular las derivadas de la función de costo para todos los parámetros de la red
PyTorch tiene incorporado un sistema de diferenciación automática denominado autograd
Para poder derivar una función en pytorch
Se necesita que su entrada sean tensores con el atributo
requires_grad=TrueLuego llamamos la función
backward()de la funciónEl resultado queda guardado en el atributo
gradde la entrada (nodo hoja)
Ejemplo
%matplotlib inline
import matplotlib.pyplot as plt
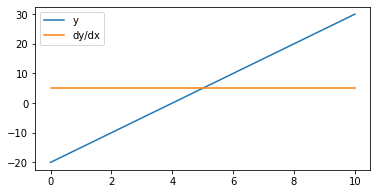
x = torch.linspace(0, 10, steps=1000, requires_grad=True)
y = 5*x - 20
y.backward(torch.ones_like(x))
fig, ax = plt.subplots(figsize=(6, 3))
ax.plot(x.detach().numpy(), y.detach().numpy(), label='y')
ax.plot(x.detach().numpy(), x.grad.detach().numpy(), label='dy/dx')
plt.legend();
x = torch.linspace(0, 10, steps=1000, requires_grad=True)
y = torch.sin(2.0*np.pi*x)*torch.exp(-(x-5).pow(2)/3)
y.backward(torch.ones_like(x))
fig, ax = plt.subplots(figsize=(6, 3))
ax.plot(x.detach().numpy(), y.detach().numpy(), label='y')
ax.plot(x.detach().numpy(), x.grad.detach().numpy(), label='dy/dx')
plt.legend();
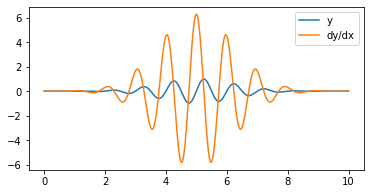
Comparado con la derivada calculada “a mano”:
dydx = 2*torch.pi*torch.cos(2.0*np.pi*x)*torch.exp(-(x-5).pow(2)/3) - 2/3*(x-5)*torch.sin(2.0*np.pi*x)*torch.exp(-(x-5).pow(2)/3)
torch.sum(torch.pow(x.grad.detach() - dydx, 2))
tensor(1.1211e-11, grad_fn=<SumBackward0>)
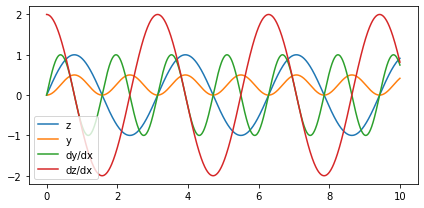
12.3. Grafo de cómputo#
Cuando concatenamos operacionesm PyTorch construye internamente un “grafo de cómputo”
El método backward() calcula los gradientes y los almacena en los nodo hoja que tengan requires_grad=True
Por ejemplo
y.backward : Guarda dy/dx en x.grad
z.backward : Guarda dz/dx en x.grad
Nota
backward() implementa la regla de la cadena de las derivadas
backward recibe una entrada: La derivada de la etapa superior de la cadena. Por defecto usa torch.ones([1]), es decir que asume que está en el nivel superior del grafo y que la salida es escalar (unidimensional)
x = torch.linspace(0, 10, steps=1000, requires_grad=True) # Nodo hoja
x.grad_fn
z = torch.sin(2*x)
z.grad_fn
<SinBackward0 at 0x7fa4111072b0>
y = z.pow(2)/2
y.grad_fn
<DivBackward0 at 0x7fa4111073d0>
fig, ax = plt.subplots(figsize=(6, 3), tight_layout=True)
ax.plot(x.detach().numpy(), z.detach().numpy(), label='z')
ax.plot(x.detach().numpy(), y.detach().numpy(), label='y')
# Derivada dy/dx
y.backward(torch.ones_like(x), retain_graph=True)
ax.plot(x.detach().numpy(), x.grad.detach().numpy(), label='dy/dx')
# Borro el resultado en x.grad
x.grad = None
# Derivada dz/dx
z.backward(torch.ones_like(x))
ax.plot(x.detach().numpy(), x.grad.detach().numpy(), label='dz/dx')
plt.legend();
Nota
El método detach() retorna una copia del tensor que se ha “despegado” del grafo
12.4. Construcción de redes neuronales#
PyTorch nos ofrece la clase tensor y las funcionalidades de autograd. Estas poderosas herramientas nos dan todo lo necesario para construir y entrenar redes neuronales artificiales
Para facilitar aun más estas tareas PyTorch tiene módulos de alto nivel que implementan
Modelo base de red neuronal:
torch.nn.ModuleDistintos tipos de capas, funciones de activación y funciones de costo:
torch.nnDistintos algoritmos de optimización basados en gradiente descedente:
torch.optim
Una red neuronal en PyTorch es una clase de Python que hereda de torch.nn.Module. Como mínimo esta clase debe implementar las funciones __init__ y forward
El constructor define las capas que se utilizaran
Heredar de
nn.Modulehace que los parámetros de las capas queden registrados por la máquina de estado de PyTorchLa función
forwardrecibe como argumento los datos de entrada y retorna la predicción del modelo, es decir que define como se conectan las capas
Nota
La función forward() actua como la función __call__() de Python, es decir que se creamos una objeto model que herada de nn.Module llamar model.forward(x) es equivalente a model(x)
12.4.1. Capa completamente conectada#
Una capa completamente conectada (fully-connected) también llamada capa densa, implementa la siguiente operación
donde \(x\) son los datos que entran en la capa y \(w/b\) son los parámetros de la capa (pesos y sesgos) de la capa
Esta capa está implementada en Pytorch como torch.nn.Linear. El constructor de este objeto espera la dimensionalidad (número de neuronas) de entrada y salida de la capa
Por ejemplo para crear una capa como el siguiente diagrama
usariamos
dense = torch.nn.Linear(3, 2)
Una vez creada la podemos evaluar con dense(data) o dense.forward(data)
Nota
Las capas son a su vez instancias de torch.nn.Module. Es decir que un módulo puede tener otros módulos anidados
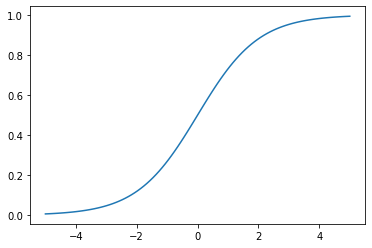
12.4.2. Funciones de activación#
Las funciones de activación más comunes de la literatura están implementadas como clases en torch.nn
Veamos algunos ejemplos para aprender a utilizarlas:
data = torch.linspace(-5, 5, steps=100)
activation = torch.nn.Sigmoid()
fig, ax = plt.subplots()
ax.plot(data.detach(), activation(data).detach());
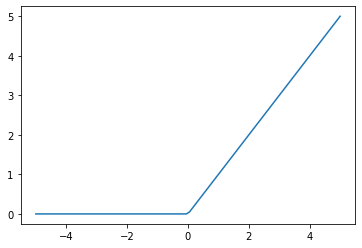
activation = torch.nn.ReLU()
fig, ax = plt.subplots()
ax.plot(data.detach(), activation(data).detach());
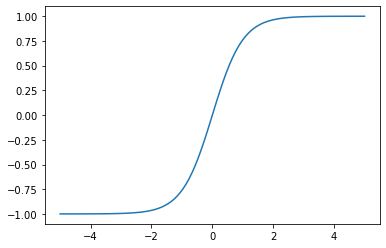
activation = torch.nn.Tanh()
fig, ax = plt.subplots()
ax.plot(data.detach(), activation(data).detach());
12.4.3. Perceptron multicapa en Pytorch#
Utilicemos lo aprendio para implementar un perceptrón multicapa con una capa oculta y función de activación sigmoide:
import torch
import torch.nn as nn
class MultiLayerPerceptron(nn.Module):
def __init__(self, input_dim, hidden_dim, output_dim):
super(type(self), self).__init__()
self.hidden = nn.Linear(input_dim, hidden_dim)
self.output = nn.Linear(hidden_dim, output_dim)
self.activation = nn.Sigmoid()
def forward(self, x):
x = self.activation(self.hidden(x))
return self.output(x)
Crear una capa Linear hace que se registren sus parámetros weight y bias en el grafo. Inicialmente los parámetros tienen valores aleatorios
model = MultiLayerPerceptron(input_dim=2, output_dim=1, hidden_dim=2)
model.hidden.weight, model.hidden.bias
(Parameter containing:
tensor([[0.6125, 0.4714],
[0.0419, 0.5960]], requires_grad=True),
Parameter containing:
tensor([-0.2803, 0.3135], requires_grad=True))
model.output.weight, model.output.bias
(Parameter containing:
tensor([[-0.1091, -0.2248]], requires_grad=True),
Parameter containing:
tensor([-0.2507], requires_grad=True))
El modelo se evalua sobre un tensor de datos llamando a su función forward
X = 10*torch.rand(10000, 2) - 5
Y = model(X)
PyTorch también admite una forma “más funcional” de crear modelos utilizando torch.nn.Sequential
El modelo anterior sería:
model = nn.Sequential(nn.Linear(2, 2),
nn.Sigmoid(),
nn.Linear(2, 1))
Esta forma de crear modelos es más consisa pero menos reutilizable