14. Procesamiento digital de imágenes#
Una imagen es una colección de pixeles ordenados. En estándar RGB cada pixel corresponde a 3 valores enteros de 8 bit (256 niveles). Combinándolos formamos colores (aproximadamente 16.7M)
Otra codificación usual para los pixeles consiste en usar un número entre cero y uno para cada canal (color). El estándar RGBA añade un canal que representa la opacidad. Las imágenes en escala de grises y sin opacidad se pueden representar usando un canal
A continuación se muestra una imagen transformada a escala de grises mediante una combinación de sus canales de color:
%matplotlib inline
import numpy as np
import matplotlib.pyplot as plt
img = plt.imread('img/cameraman.png')
def to_grayscale(img):
return np.dot(img[:, :, :3],
np.array([0.2989, 0.587, 0.114]))
img_bw = to_grayscale(img)
display(img_bw.shape)
display(img_bw.dtype)
plt.figure(figsize=(4, 4), tight_layout=True)
plt.imshow(img_bw, cmap=plt.cm.Greys_r);
(327, 326)
dtype('float64')

Para nuestros sistemas digitales una imagen es una arreglo multidimensional y podemos operarlo como tal
¿A qué corresponde este segmento del arreglo?
subimg = np.copy(img_bw[50:100, 120:180])
display(subimg)
array([[0.72541766, 0.72933884, 0.72933884, ..., 0.72149649, 0.71757531,
0.71365413],
[0.72541766, 0.73326002, 0.73326002, ..., 0.71757531, 0.71365413,
0.71365413],
[0.73718119, 0.72541766, 0.72541766, ..., 0.71757531, 0.70189061,
0.72541766],
...,
[0.03529059, 0.03136941, 0.03136941, ..., 0.15684706, 0.14116236,
0.18821647],
[0.03529059, 0.02744824, 0.02744824, ..., 0.15684706, 0.14116236,
0.23527059],
[0.03529059, 0.03136941, 0.02352706, ..., 0.15292589, 0.13332001,
0.27448237]])
plt.figure(figsize=(3, 3), tight_layout=True)
plt.imshow(subimg, cmap=plt.cm.Greys_r);

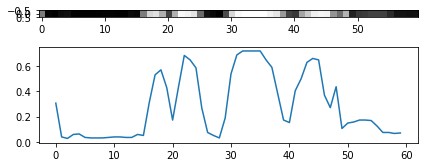
¿Y este segmento?
fig, ax = plt.subplots(2, 1, figsize=(6, 3), tight_layout=True)
ax[1].plot(subimg[30, :])
ax[0].imshow(subimg[30:31, :], cmap=plt.cm.Greys_r);
14.1. Convolución y correlación cruzada discreta#
Una herramienta clásica de procesamiento digital de señales es la convolución
La operación de convolución entre dos señales unidimensionales discretas es
y la operación de correlación cruzada es
Nota
Para ambas operaciones el resultado es una nueva señal que también depende de \(n\)
Por ejemplo el elemento \(0\) de \(f\star g\) se calcula como
f[0] g[0] + f[1] g[1] + f[2] g[2] + ...
Luego el elemento \(1\) sería
f[0] g[1] + f[1] g[2] + f[2] g[3] + ...
14.2. Filtrado de imágenes con convoluciones#
Se puede extender el concepto de convolución a dos dimensiones
donde \(n_1\) es el índice de las filas y \(n_2\) es el índice de las columnas
Nota
La convolución entre dos imágenes es una nueva imagen
La imagen \(I_1\) es la entrada
La imagen \(I_2\) se denomina filtro o kernel de la convolución
La imagen resultante es la imagen filtrada
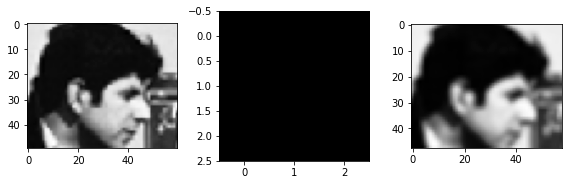
Filtro pasa-bajo
Suaviza, elimina los detalles
import scipy.signal
D = 3
filt = np.ones(shape=(D, D))
display(filt)
img_res = scipy.signal.correlate2d(subimg, filt/np.sum(filt), mode='valid')
fig, ax = plt.subplots(1, 3, figsize=(8, 3), tight_layout=True)
ax[0].imshow(subimg, cmap=plt.cm.Greys_r)
ax[1].imshow(filt, cmap=plt.cm.Greys_r)
ax[2].imshow(img_res, cmap=plt.cm.Greys_r);
array([[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.]])
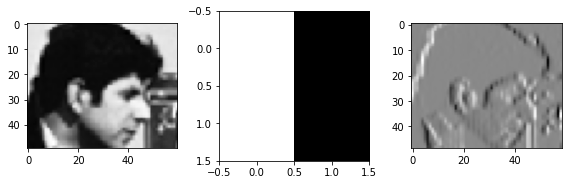
Filtro pasa-alto
Resalta los cambios bruscos, elimina las partes “planas”
filt = np.array([[1., -1.]]*2)
display(filt)
img_res = scipy.signal.correlate2d(subimg, filt, mode='valid')
fig, ax = plt.subplots(1, 3, figsize=(8, 3), tight_layout=True)
ax[0].imshow(subimg, cmap=plt.cm.Greys_r)
ax[1].imshow(filt, cmap=plt.cm.Greys_r)
ax[2].imshow(img_res, cmap=plt.cm.Greys_r);
array([[ 1., -1.],
[ 1., -1.]])
¿Detector de patillas?
Detecta patillas de fotografos mirando al horizonte
filt = np.ones(shape=(11, 11))
filt[:9, 2:9] = 0
display(filt)
array([[1., 1., 0., 0., 0., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 0., 0., 0., 1., 1.],
[1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1.]])
img_res = scipy.signal.correlate2d(subimg, filt-np.mean(filt), mode='valid')
fig, ax = plt.subplots(1, 3, figsize=(8, 3), tight_layout=True)
ax[0].imshow(subimg, cmap=plt.cm.Greys_r)
maxloc = np.unravel_index(np.argmax(img_res), shape=img_res.shape)
ax[0].scatter(maxloc[1]+filt.shape[0]//2, maxloc[0]+filt.shape[1]//2, c='r', s=20)
ax[1].imshow(filt, cmap=plt.cm.Greys_r)
ax[2].imshow(img_res, cmap=plt.cm.Reds);
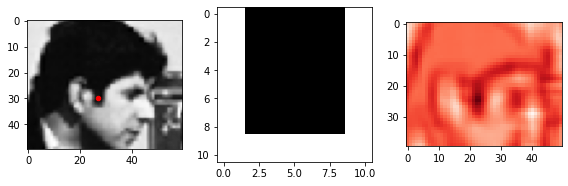
En realidad el filtro se activa con cualquier cosa con forma de “U”
Importante
Podríamos aprender filtros para detectar objetos específicos
En tal caso necesitamos aprender los valores de los “píxeles” del kernel