%matplotlib inline
import numpy as np
import matplotlib.pyplot as plt
import scipy.fft
import cv2
from PIL import Image
6. Filtrado de imágenes#
En esta lección veremos:
Filtrado con máscaras en frecuencia
Filtrado con convolución 2D
6.1. Filtro en frecuencia#
Recordemos que, por propiedad de la transformada de Fourier
Importante
Una multiplicación en el espacio de frecuencia equivale a una convolución en el espacio original
Podemos usar esta propiedad para hacer filtrado
Calculamos el espectro de la imagen usando la DFT
Multiplicamos el espectro por una ventana
Aplicamos DFT inversa para obtener la imagen filtrada
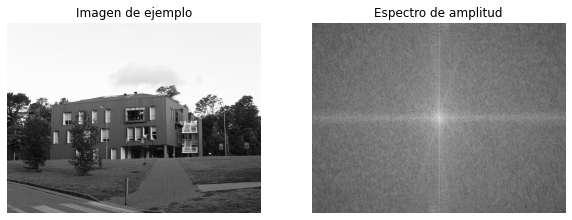
Ejemplo: Filtro pasa-bajos
Usamos opencv para calcular la transformada de Fourier de la siguiente imagen
inst = cv2.cvtColor(cv2.imread('data/InsInformatica.jpg'), cv2.COLOR_BGR2GRAY)
inst_dft = cv2.dft(np.float32(inst), flags=cv2.DFT_COMPLEX_OUTPUT)
inst_magnitude, inst_phase = cv2.cartToPolar(inst_dft[:,:,0], inst_dft[:,:,1])
fig, ax = plt.subplots(1, 2, figsize=(10, 5))
ax[0].imshow(inst, cmap=plt.cm.Greys_r)
ax[0].axis('off')
ax[0].set_title('Imagen de ejemplo')
ax[1].imshow(scipy.fft.fftshift(1+np.log(inst_magnitude)), cmap=plt.cm.Greys_r)
ax[1].axis('off');
ax[1].set_title('Espectro de amplitud');
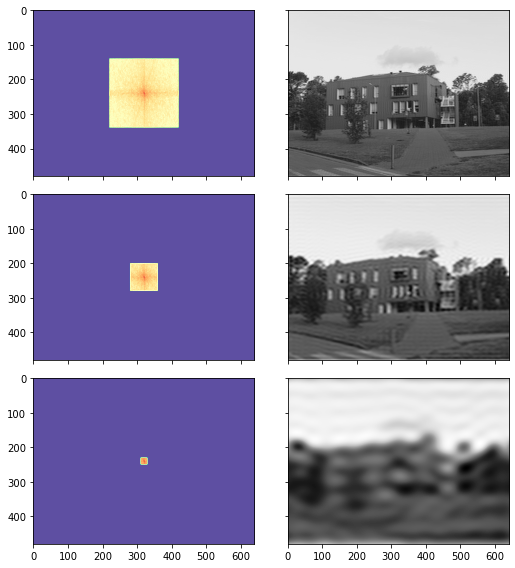
Multipliquemos el espectro por una ventana rectangular que multiplique por cero las frecuencias altas
Importante
Eliminar las frecuencias altas tiene un efecto de suavizado en la imagen original
Luego tomamos la transformada de Fourier inversa del espectro multiplicado para obtener una imagen filtrada.
Observe como cambia el resultado a medida que disminuimos progresivamente el tamaño de la ventana (sigma)
def reconstruct(mag, phase):
return cv2.dft(cv2.merge([*cv2.polarToCart(mag, phase)]),
flags=cv2.DFT_INVERSE | cv2.DFT_REAL_OUTPUT | cv2.DFT_SCALE)
def create_mask(img_shape, sigma):
cy, cx = img_shape[0]/2, img_shape[1]/2
x = np.arange(0, img_shape[1]);
y = np.arange(0, img_shape[0]);
X, Y = np.meshgrid(x, y)
mask = np.zeros(shape=img_shape, dtype=np.float32)
mask[int(cy-sigma):int(cy+sigma),
int(cx-sigma):int(cx+sigma)] = 1
return mask
fig, ax = plt.subplots(3, 2, figsize=(8, 8), tight_layout=True, sharex=True, sharey=True);
for i, sigma in enumerate([100, 40, 10]):
espectro_filtrado = scipy.fft.fftshift(inst_magnitude)*create_mask(inst.shape, sigma)
ax[i, 0].imshow(np.log(1+np.abs(espectro_filtrado)), cmap=plt.cm.Spectral_r)
image_reconstruida = reconstruct(scipy.fft.ifftshift(espectro_filtrado), inst_phase)
ax[i, 1].imshow(image_reconstruida, cmap=plt.cm.Greys_r)
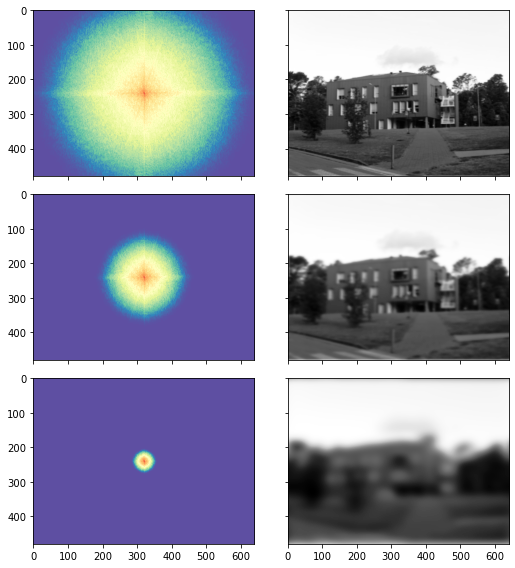
Este procedimiento puede usarse para eliminar ruido a costa de perder detalles
Para evitar artefactos causados por los bordes abruptos de la señal rectangular podemos reemplazar la misma por una ventana Gaussiana. Esta operación se suele llamar “suavizado gaussiano”
def create_mask(img_shape, sigma):
cy, cx = img_shape[0]/2, img_shape[1]/2
x = np.arange(0, img_shape[1]);
y = np.arange(0, img_shape[0]);
X, Y = np.meshgrid(x, y)
return 1e-8 + np.exp(-(((X-cx)/sigma)**2 + ((Y-cy)/sigma)**2)).astype('float32')
fig, ax = plt.subplots(3, 2, figsize=(8, 8), tight_layout=True, sharex=True, sharey=True);
for i, sigma in enumerate([100, 40, 10]):
espectro_filtrado = scipy.fft.fftshift(inst_magnitude)*create_mask(inst.shape, sigma)
ax[i, 0].imshow(np.log(1+np.abs(espectro_filtrado)), cmap=plt.cm.Spectral_r)
image_reconstruida = reconstruct(scipy.fft.ifftshift(espectro_filtrado), inst_phase)
ax[i, 1].imshow(image_reconstruida, cmap=plt.cm.Greys_r)
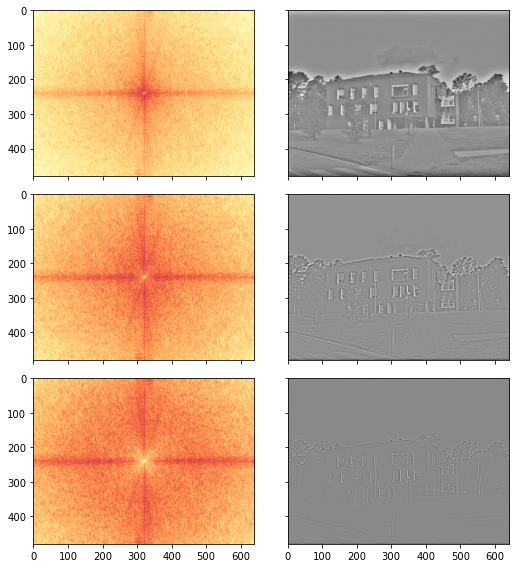
Ejemplo: Filtro pasa-altos
Si usamos el inverso de una ventana gaussiana entonces estaríamos multiplicando por cero las frecuencias más bajas. Esto borra los colores, dejándo sólo los detalles o bordes
Observe como cambia el resultado a medida que borramos más frecuencias bajas
def create_mask(img_shape, sigma):
cy, cx = img_shape[0]/2, img_shape[1]/2
x = np.arange(0, img_shape[1]);
y = np.arange(0, img_shape[0]);
X, Y = np.meshgrid(x, y)
return 1.0 - np.exp(-(((X-cx)/sigma)**2 + ((Y-cy)/sigma)**2)).astype('float32')
fig, ax = plt.subplots(3, 2, figsize=(8, 8), tight_layout=True, sharex=True, sharey=True);
for i, sigma in enumerate([10, 40, 100]):
espectro_filtrado = scipy.fft.fftshift(inst_magnitude)*create_mask(inst.shape, sigma)
ax[i, 0].imshow(np.log(1+np.abs(espectro_filtrado)), cmap=plt.cm.Spectral_r)
image_reconstruida = reconstruct(scipy.fft.ifftshift(espectro_filtrado), inst_phase)
ax[i, 1].imshow(image_reconstruida, cmap=plt.cm.Greys_r)
6.2. Filtrado en el dominio de la imagen#
También es posible filtrar una imagen directamente en el espacio original usando la convolución bidimensional.
El elemento que se convoluciona con la imagen se denomina filtro o kernel de convolución
La siguiente animación muestra el proceso de convolución en dos dimensiones

¿Qué cree usted que hacen estos los siguientes kernels/filtros?
Ambos son filtros promediadores, es decir que reemplazan cada pixel por un promedio de sus vecinos. Estos filtros actuan como pasa-bajos ya que suavizan la imagen.
Con OpenCV se puede filtrar con la función filter2D la cual recibe como argumentos
src: La imagen que se quiere filtrarKernel: El filtro con que se desea convolucionarddepth: Profundidad o número de canales de la imagen resultante, se puede usar-1para forzar la misma profundidad desrc
Ejemplo: Filtro rectangular promediador
size = 20
kernel = np.ones(shape=(size, size))/size**2
fig, ax = plt.subplots(figsize=(5, 3.5), tight_layout=True);
ax.imshow(cv2.filter2D(src=inst, ddepth=-1, kernel=kernel), cmap=plt.cm.Greys_r)
ax.axis('off');

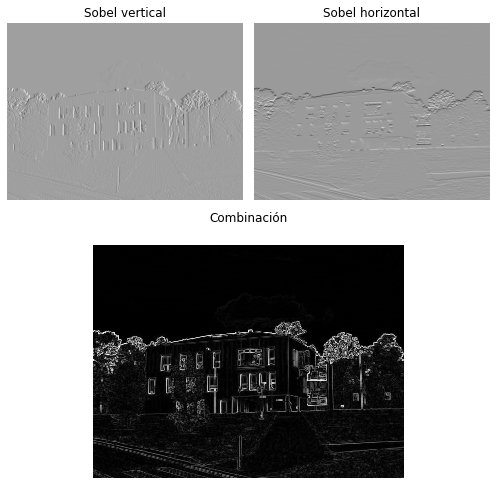
Ejemplo: Detección de borde con filtro Sobel
Los siguientes filtros se conocen como sobel horizontal y vertical
sobel_v = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]])
sobel_h = np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]])
Se utilizan para resaltar los bordes de la imagen
filtered_v = cv2.filter2D(src=inst.astype('float32'), ddepth=-1, kernel=sobel_v)
filtered_h = cv2.filter2D(src=inst.astype('float32'), ddepth=-1, kernel=sobel_h)
fig, ax = plt.subplots(figsize=(7, 7), tight_layout=True);
ax = plt.subplot2grid((2, 2), (0, 0))
ax.imshow(filtered_v, cmap=plt.cm.Greys_r);
ax.axis('off')
ax.set_title('Sobel vertical')
ax = plt.subplot2grid((2, 2), (0, 1))
ax.imshow(filtered_h, cmap=plt.cm.Greys_r)
ax.axis('off')
ax.set_title('Sobel horizontal')
ax = plt.subplot2grid((2, 2), (1, 0), colspan=2)
ax.matshow(np.sqrt(filtered_v**2 + filtered_h**2)[3:-3,3:-3], cmap=plt.cm.Greys_r)
ax.axis('off')
ax.set_title('Combinación');
6.3. Ruido en imágenes#
Existen distintos tipos de ruido que pueden afectar una imagen
Ruido térmico, ruido de lectura, ruido eléctronico: Se modelan tipicamente como ruido blanco Gaussiano
Ruido sal y pimienta o Ruido impulsivo: Se traduce en píxeles que se saturan en sus valores máximos/mínimos
Interferencia periódica: Puede modelarse como una sinusoide
A continuación mostraremos como se ven estos ruidos para aprender a reconocerlos
También veremos como disminuir sus efectos usando filtros
Considere la siguiente imagen de ejemplo:
lobo = cv2.cvtColor(cv2.imread('data/lobo.jpg'), cv2.COLOR_BGR2GRAY)
Image.fromarray(lobo)

Así se vería si la corrompemos añadiendo ruido blanco gaussiano con una desviación estándar de \(20\)
sigma = 20
noise = np.random.randn(lobo.shape[0], lobo.shape[1])
lobo_corrupted = lobo + sigma*noise
fig, ax = plt.subplots(figsize=(6, 3.5), tight_layout=True)
ax.matshow(lobo_corrupted, cmap=plt.cm.Greys_r)
ax.axis('off');
El ruido blanco se presenta en todo el espectro. Por ende no es posible eliminarlo completamente pero podemos disminuir su efecto usando un filtro pasabajo
Para llegar a un buen resultado se debe calibrar el tamaño del filtro. En este caso particular un filtro rectangular de tamaño \(5\) entrega un resultado aceptable
size = 5
kernel = np.ones(shape=(size, size))/size**2
lobo_filtered = cv2.filter2D(src=lobo_corrupted, ddepth=-1, kernel=kernel)
fig, ax = plt.subplots(figsize=(6, 3.5), tight_layout=True)
ax.matshow(lobo_filtered, cmap=plt.cm.Greys_r)
ax.axis('off');
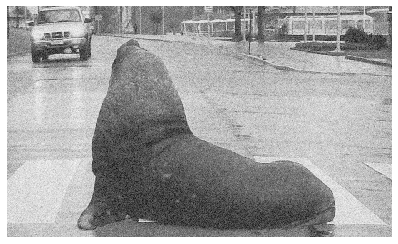
Ejemplo: Eliminar ruido impulsivo
El ruido impulso o ruido sal y pimienta aparece como pixeles saturados en la imagen
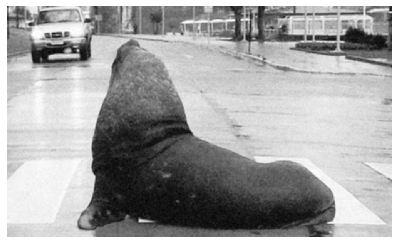
Un filtro tipicamente usando para disminuir este ruido es el filtro mediana. Si se aplica la mediana en una vecindad los valores extremos serán ignorados
La función medianBlur de opencv implementa el filtro mediana y recibe la imagen a filtrar y el tamaño de vecindad del filtro
noise = np.random.rand(*lobo.shape)
lobo_corrupted = np.where(noise < 0.1, 255, lobo)
lobo_filtered = cv2.medianBlur(lobo_corrupted, 5)
fig, ax = plt.subplots(1, 2, figsize=(6, 3.5), tight_layout=True, sharex=True, sharey=True)
ax[0].matshow(lobo_corrupted[:, 100:600], cmap=plt.cm.Greys_r)
ax[0].set_title('Imagen con ruido impulsivo')
ax[0].axis('off')
ax[1].matshow(lobo_filtered[:, 100:600], cmap=plt.cm.Greys_r)
ax[1].set_title('Limpieza con filtro mediana')
ax[1].axis('off');
